Gerade als Sie dachten, Ihre Liste der Wochenendprojekte sei endlich überschaubar, hat die University of California, Los Angeles (UCLA) beschlossen, einen Gang hochzuschalten. Das renommierte Robotics and Mechanisms Laboratory (RoMeLa) hat soeben die Baupläne für ARTEMIS, seinen lebensgroßen, Fußball spielenden humanoiden Roboter, als Open Source veröffentlicht. Also, räumen Sie schon mal die Garage auf; die Ära der „Build-Your-Own-Humanoid“ (BYOH)-Bewegung hat offiziell und vielleicht auch ein wenig beängstigend begonnen.
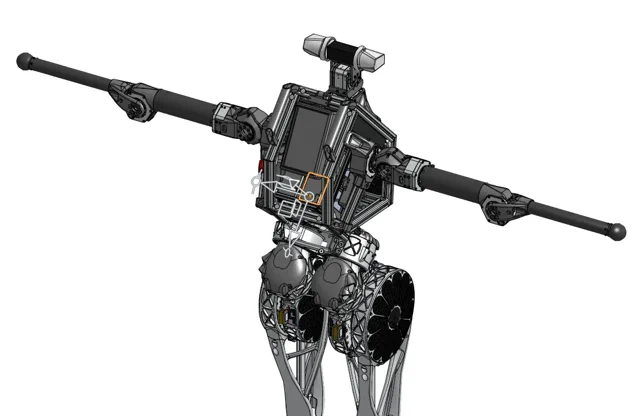
Für alle, denen ARTEMIS noch kein Begriff ist: Das hier ist keine gewöhnliche Blechbüchse. Mit einer Größe von 1,42 Metern (4 Fuß, 8 Zoll) und einem Gewicht von 38,5 Kilogramm (85 Pfund) ist ARTEMIS ein Wunderwerk dynamischer Fortbewegung. Bei Labortests erreichte er eine Gehgeschwindigkeit von 2,1 Metern pro Sekunde, was ihn zum Zeitpunkt seines Debüts zum schnellsten gehenden humanoiden Roboter der Welt machte. Noch beeindruckender: Er war der erste Humanoid aus einem akademischen Labor – und überhaupt erst der dritte –, der in der Lage war zu rennen, was bedeutet, dass er eine volle Flugphase mit beiden Füßen vom Boden erreichen kann.

Dieser zweibeinige Bot wurde auf dem unebenen Gelände des UCLA-Campus getestet und trat beim internationalen RoboCup-Fußballturnier an – einem Prüfstand für autonome Roboter mit dem kühnen Ziel, bis 2050 eine menschliche Weltcup-Mannschaft zu schlagen.
Das Geheimrezept: Elektrische Muskeln und elegantes Fußwerk
Was macht ARTEMIS also so flink? Die Innovation liegt in seinen Aktuatoren – den Komponenten, die Energie in Bewegung umwandeln. Anstelle der starren, positionsgesteuerten Motoren, die in den meisten Robotern zu finden sind, verwendet ARTEMIS maßgeschneiderte „propriozeptive Aktuatoren“. Laienhaft ausgedrückt sind diese Aktuatoren kraftgesteuert und federnd, so konzipiert, dass sie sich eher wie biologische Muskeln verhalten. Dies ermöglicht es dem Roboter, den Boden und seine eigenen Bewegungen zu „fühlen“, was ihm eine überragende Balance und die Fähigkeit verleiht, Stöße zu absorbieren – entscheidend für das Gehen in unwegsamem Gelände oder, sagen wir, wenn er mal angerempelt wird.
Dieses bio-inspirierte Design stellt eine deutliche Abkehr von den lauten, leckageanfälligen Hydrauliksystemen dar, die von einigen seiner berühmten Cousins verwendet werden. ARTEMIS ist zu 100 % elektrisch angetrieben, was ihn leiser und effizienter macht. Das Ergebnis ist ein Roboter, der nicht nur gehen und rennen kann, sondern dies auch mit einer fast schon unheimlichen Anmut tut, wie seine Leistung auf dem Fußballfeld eindrucksvoll beweist.
„Das ist der Schlüssel zu seiner exzellenten Balance beim Gehen auf unebenem Gelände und seiner Fähigkeit zu rennen“, sagte Dennis Hong, UCLA-Professor und Direktor von RoMeLa. „Dies ist ein Roboter seiner Art, der erste seiner Art.“
Und damit Sie nicht denken, das alles sei nur akademische Theorie, hier ist ARTEMIS in Aktion beim RoboCup, wo er seine 20 Freiheitsgrade unter Beweis stellt.

Open Source, Zusammenbau Erforderlich
In einem Schritt, der eine starke Botschaft an die eher verschwiegenen Ecken der Robotikindustrie sendet, hat RoMeLa seine Karten auf den Tisch gelegt. Die Open-Source-Veröffentlichung ist nicht nur ein Whitepaper; sie ist ein umfassendes Toolkit für angehende Robotiker. Das vollständige ARTEMIS-Projekt ist verfügbar unter artemis.romela.org.
Das Repository bietet Zugang zu einer wahren Fundgrube an Ingenieursdaten, darunter:
- Vollständige CAD-Modelle (verfügbar auf OnShape)
- Designs für den Motortreiber
- Spezifikationen für den USB-Adapter, den E-Stop, das BMS und das Ladegerät
- Das URDF-Modell (Unified Robot Description Format) des Roboters für die Simulation
Diese Veröffentlichung bietet effektiv eine grundlegende Plattform für jede Universität oder jeden gut ausgestatteten Hobbyisten, um seinen eigenen fortschrittlichen Humanoiden zu bauen. Während Software und Steuerungen als zukünftige Veröffentlichung angekündigt sind, stellt die Hardware allein einen monumentalen Vorsprung dar und demokratisiert die Forschung, die bisher das exklusive Terrain einiger weniger Unternehmens- und Akademiegiganten war.
Ein Tritt in die richtige Richtung
Durch die Open-Source-Veröffentlichung von ARTEMIS tun UCLA und RoMeLa mehr, als nur ein cooles Projekt zu teilen; sie beschleunigen das gesamte Feld. Dies ermöglicht es Forschern weltweit, auf einer bewährten, hochleistungsfähigen Plattform aufzubauen und so Jahre grundlegender Arbeit einzusparen. Es ist eine direkte Herausforderung an den „Walled-Garden“-Ansatz und ein Beweis für die Kraft der akademischen Zusammenarbeit.
Auch wenn Sie wohl kaum an diesem Wochenende einen Artemis in Ihrem Wohnzimmer zusammenbauen werden, signalisiert diese Veröffentlichung doch eine große Verschiebung. Die Zukunft der Robotik wird vielleicht nicht in geheimen Laboren gebaut, sondern in gemeinsamen Repositories und kollaborativen Gemeinschaften. Das Zeitalter des BYOH ist angebrochen, und es beginnt mit einem Weltklasse-Fußballroboter. Ihr Zug, alle anderen.