Wenn Sie jemals versucht haben, eine Roboterhand zu bauen, wissen Sie: Das ist ein Albtraum für Ingenieure. Die delikate, anpassungsfähige Greiffähigkeit einer menschlichen Hand nachzubilden, gleicht dem Endgegner der Robotik. Die primäre Herausforderung besteht nicht nur darin, mehr Gelenke hinzuzufügen; es geht darum, ein System zu schaffen, das sich unregelmäßig geformten Objekten anpassen kann, ohne für jeden einzelnen Gelenkpunkt einen schweren, stromhungrigen Motor zu benötigen. Die meisten Designs sind zu starr, zu komplex oder zu fragil für die reale Welt.
Hier kommt Tesla ins Spiel. Eine kürzlich veröffentlichte Patentanmeldung (WO2024/073138A1) für die Optimus Gen 2 Hand lüftet den Vorhang ihrer Designphilosophie, und es ist eine Meisterklasse in brutaler Effizienz. Anstatt Komplexität zu jagen, haben Teslas Ingenieure auf clevere Physik, robuste Mechanik und ein Design-Ethos gesetzt, das “für die Fertigung gebaut, nicht nur für Demos” schreit.
Der Vorteil der Unteraktuierung
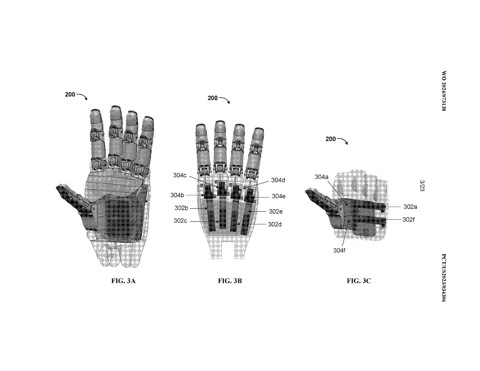
Das Herzstück von Teslas Design ist ein „unteraktuierte“ System, ein Konzept, bei dem weniger Motoren als die Gesamtzahl der Gelenke verwendet werden. Bei der Optimus-Hand steuern sechs Aktuatoren elf Gelenke – zwei für den Daumen und je eines für jeden der vier Finger. Dies wird durch ein seilgetriebenes System erreicht, das wie eine biologische Sehne funktioniert. Ein einziges Kabel verläuft durch jeden Finger, und wenn es gezogen wird, krümmen sich die Gelenke in einer natürlichen, sequentiellen Bewegung.
Dieser Ansatz löst das Anpassungsproblem. Da die Gelenke nicht in einen starren, vorbestimmten Pfad gezwungen werden, können sich die Finger passiv der Form eines Objekts anpassen, sei es eine Bohrmaschine oder ein zerbrechliches Ei. Es ist eine Form von „mechanischer Intelligenz“, die komplexe Greifberechnungen von der Software direkt in die Hardware verlagert.
Doch Teslas Ingenieure fügten einen entscheidenden Kniff hinzu. Die Torsionsfedern am Basisgelenk jedes Fingers sind bewusst steifer als die an der Fingerspitze. Dies erzeugt eine „passive Intelligenz“, bei der sich das schwächere Fingerspitzen-Gelenk zuerst biegt, um ein Objekt zu umschließen, gefolgt vom stärkeren Basisgelenk. Dies garantiert automatisch einen sicheren, „umschließenden“ Griff, ohne dass der zentrale Prozessor des Roboters darüber grübeln muss.
Schneckengetriebe: Schwere Lasten gratis halten
Das vielleicht brillanteste Ingenieurstück, das im Patent verborgen ist, ist die Verwendung eines Schneckengetriebes und Schneckenradgetriebes für die Aktuatoren. Hier geht es nicht nur darum, die Rotation eines Motors in einen Kabelzug umzuwandeln; es ist ein Physik-Hack mit massiven Auswirkungen auf die Effizienz.
Schneckengetriebe sind typischerweise „selbsthemmend“. Aufgrund der hohen Reibung und des steilen Winkels der Zahnräder kann das Abtriebsrad das Eingangsschneckengetriebe nicht antreiben. Für einen Roboter ist das eine Superkraft. Sobald Optimus ein schweres Objekt greift, verriegeln die Zahnräder den Griff mechanisch. Die Motoren können sich dann vollständig entspannen und das Gewicht ohne Stromverbrauch halten. Im Vergleich zu Direktantriebshänden, die ständig Energie verbrennen müssen, um der Schwerkraft entgegenzuwirken, ist dies ein monumentaler Gewinn für die Akkulaufzeit und das Wärmemanagement.
Diese Anordnung bietet auch eine massive Untersetzung in einer einzigen, kompakten Stufe, wodurch winzige, hochdrehende Motoren eine knochenbrechende Greifkraft erzeugen können, während sie sauber in der Handfläche verpackt sind.
Für die reale Welt gebaut: Haltbarkeit und Präzision
Ein großartiges Design auf dem Papier ist nutzlos, wenn es nach tausend Zyklen den Geist aufgibt. Das Patent offenbart eine tiefe Besessenheit von langfristiger Zuverlässigkeit.
Eine der größten Schwachstellen in seilgetriebenen Systemen ist die Kabelermüdung und -dehnung. Tesla begegnet dem mit zwei cleveren Lösungen:
- Der Kniff mit der konvexen Krümmung: Anstatt das Kabel scharf über ein Gelenk biegen zu lassen, ist eine glatte, konvex gekrümmte Oberfläche zwischen den Fingergliedern geformt. Dies zwingt das Kabel, sich über einen sicheren Radius zu biegen, was seine Lebensdauer massiv verlängert.
- Der automatische Spanner: In der Fingerspitze verborgen ist ein federbelasteter Mechanismus, der ständig am Kabelende zieht. Dies nimmt automatisch jegliches Spiel auf, wenn sich das Kabel mit der Zeit dehnt, und stellt sicher, dass die Hand jahrelang straff und reaktionsschnell bleibt, ohne manuelle Wartung.
Für die Sensorik umging Tesla klobige und fehleranfällige mechanische Sensoren. Stattdessen ist ein permanenter Ringmagnet um jeden Gelenkdrehpunkt integriert. Ein stationärer Hall-Effekt-Sensor misst das sich ändernde Magnetfeld, wenn sich das Gelenk dreht, und liefert eine präzise, reibungslose und verschleißfreie Winkelmessung. Dieser kontaktlose Ansatz ist entscheidend, um über Millionen von Zyklen hinweg eine Sub-Millimeter-Genauigkeit zu gewährleisten.
Mehr als eine Hand, es ist eine Philosophie
Beim Durchlesen der dichten, technischen Sprache des Patents zeichnet sich ein klares Bild ab. Tesla baut keine Labor-Kuriosität; es entwirft ein Produkt, das für die Massenproduktion und den Einsatz in der chaotischen, unberechenbaren realen Welt bestimmt ist. Jede Entscheidung – von den selbsthemmenden Zahnrädern bis zu den automatisch spannenden Sehnen – ist auf Effizienz, Langlebigkeit und Fertigbarkeit optimiert.
Während andere humanoide Roboter vielleicht mit mehr Freiheitsgraden oder exotischeren Aktuatoren prahlen mögen, repräsentiert die Optimus-Hand einen pragmatischen Ansatz, der sich darauf konzentriert, die Kernprobleme der robotischen Manipulation auf die einfachste und robusteste Weise zu lösen. Es ist ein Design, das versteht, dass in der realen Welt Zuverlässigkeit und Effizienz immer die auffällige Komplexität übertrumpfen werden. Und das, mehr als jedes einzelne Merkmal, macht dieses Design so überzeugend.
