Wer sagt, dass man einem alten Hund keine neuen Tricks beibringen kann? Nun, in diesem Fall handelt es sich nicht um einen Hund, sondern um einen vierbeinigen Roboter, der lernt, mehr zu tun als nur zu apportieren. Dank einer bahnbrechenden Zusammenarbeit zwischen der Carnegie Mellon University, Google DeepMind und Bosch heben unsere vierbeinigen Freunde ihr Spiel mit einem System namens Human2LocoMan auf ein neues Niveau. Das ist kein gewöhnlicher Spaziergang im Park; das ist ein Sprung in die Zukunft der Robotik!
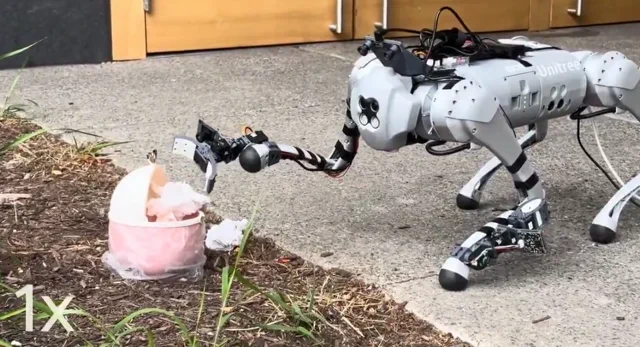
Das Erfolgsgeheimnis? Menschliche Bewegungsdaten. Durch das Vortraining der Roboter-Algorithmen mit menschlichen Bewegungen, bevor sie auf echter Hardware feinabgestimmt werden, haben diese klugen Forscher einen Vierbeiner erschaffen, der nicht nur schnell und wendig ist, sondern auch Objekte mit Finesse manipulieren kann. Stellen Sie sich einen Roboterhund vor, der nicht nur einem Ball hinterherjagen kann, sondern ihn auch aufheben, seine Spielzeuge organisieren und vielleicht sogar leichte Hausarbeiten erledigen kann. Das Bild zeigt einen dieser mechanischen Wunderwerke, der seinen Arm ausstreckt, um mit einem Objekt am Boden zu interagieren – ein Beweis seiner neugewonnenen Geschicklichkeit.
Dies ist nicht nur ein Partytrick; es ist ein bedeutender Sprung nach vorn in der Robotik. Das Human2LocoMan-System, angetrieben von einem modularen Cross-Embodiment Transformer (MXT), lernt sowohl aus menschlichen als auch aus Roboter-Demonstrationen. Das Ergebnis? Eine 50-prozentige Reduzierung der erforderlichen Roboterdaten und eine beeindruckende 80-prozentige Verbesserung der Erfolgsraten bei der Bewältigung unbekannter Umgebungen. Es ist, als würde man seinen Roboter in einen Crashkurs “Wie man menschlicher wird” schicken und zusehen, wie er mit Auszeichnung abschließt. Wer weiß, mit solchen Fähigkeiten könnten wir bald Vierbeiner in Jobs sehen, die wir uns nie hätten vorstellen können. Robo-Baristas, jemand?