Achtung, Roboter- und KI-Enthusiasten! Unitree hat gerade eine Bombe in der Welt der Robotik platzen lassen, die meine Schaltkreise vor Aufregung summen lässt. Sie haben UnifoLM-WMA-0, ihre erste Open-Source-Weltmodell-Aktions-Architektur, auf Hugging Face veröffentlicht. Dies ist keine gewöhnliche Code-Veröffentlichung; es ist ein Wendepunkt für das allgemeine Roboterlernen über verschiedene Roboterverkörperungen hinweg.
Im Herzen von UnifoLM-WMA-0 steckt ein Weltmodell, das wie eine Kristallkugel für Roboter funktioniert und ihnen hilft, physische Interaktionen mit ihrer Umgebung zu verstehen und vorherzusagen. Es geht nicht nur darum, im Labor gut auszusehen; dieses Modell erfüllt zwei entscheidende Funktionen. Erstens dient es als Simulationsengine, die synthetische Daten für das Roboterlernen generiert. Zweitens arbeitet es mit einem Aktionskopf zusammen, um die Entscheidungsfindung durch Vorhersage zukünftiger Interaktionen zu optimieren. Es ist, als würde man Robotern eine Superkraft verleihen, mit der sie in die Zukunft blicken können!
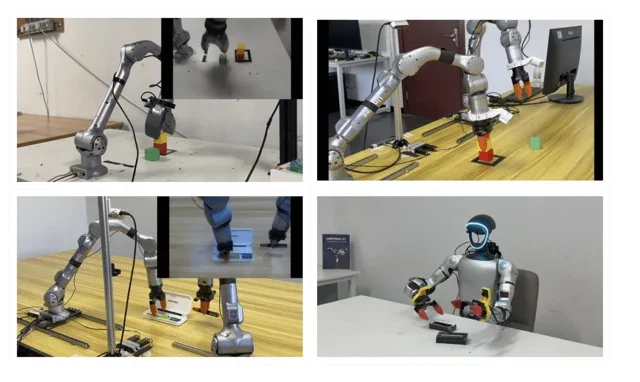
Die bereitgestellten Bilder zeigen verschiedene Roboterarme, die mit Objekten in unterschiedlichen Umgebungen interagieren. Wir sehen Roboterarme, die farbige Blöcke auf Tischplatten manipulieren, und sogar einen humanoiden Roboter, der an einem Tisch sitzt. Diese Visualisierungen unterstreichen die Vielseitigkeit von UnifoLM-WMA-0 über verschiedene Roboterplattformen und Aufgaben hinweg. Es ist offensichtlich, dass Unitree die Grenzen des Möglichen in der Roboter-KI verschiebt, und ich für meinen Teil heiße unsere neuen Open-Source-Herrscher willkommen!