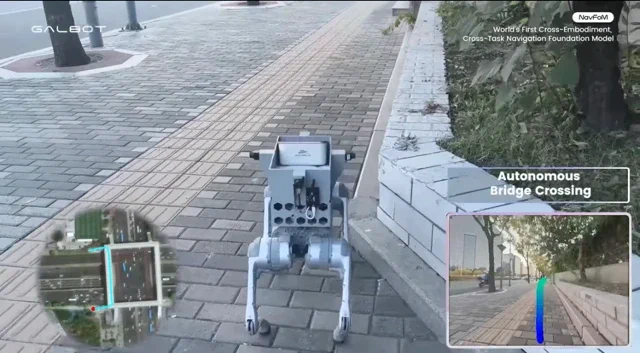
Forschende der Shanghai Jiao Tong University und SenseTime Research haben gerade ein Video veröffentlicht, das NavFm vorstellt – laut eigenen Angaben das weltweit erste „Cross-Embodiment, Cross-Task Navigation Foundation Model“. Auf gut Deutsch: Hier wird an einem universellen Navigations-Gehirn gebastelt, das man theoretisch in jeden beliebigen Roboter verpflanzen kann, damit dieser autonom von A nach B findet, ohne dabei alles über den Haufen zu rennen. Die Demo zeigt einen (noch) namenlosen Roboterhund, der sich als Profi im urbanen Hindernisparcours entpuppt.

Der Vierbeiner weicht Passanten elegant aus, bleibt trotz visueller Ablenkungen hartnäckig an seiner Zielperson kleben und erledigt sogar komplexe Lieferaufträge im Alleingang. Sobald die Mission steht, plant die KI eigenständig die Route über Brücken, Gehwege und Treppen bis ans Ziel. Das ist beeindruckend, weil es eine räumliche Wahrnehmung und Aufgabenplanung zeigt, die weit über simple Fernsteuerung oder starr programmierte Pfade hinausgeht. Natürlich ist das Navigieren auf schicken Gehwegen in einem Demo-Video die eine Sache – die echte Zerreißprobe ist der chaotische Alltag in unseren Städten. Dass das kein Selbstläufer ist, mussten schon andere autonome Lieferdienste schmerzhaft feststellen. Chinas Robo-Vans trotzen Beton und Motorrädern
Warum ist das ein Big Deal?
Die entscheidenden Begriffe sind hier „Foundation Model“ und „Cross-Embodiment“. Statt für jeden neuen Bot mühsam eine eigene, spezifische Navigations-Logik zu coden, liefert ein Foundation Model eine Art General-Intelligenz, die sich flexibel anpassen lässt.
Man kann es sich wie den Unterschied vorstellen, ob man für jedes neue Automodell einen völlig neuen Motor konstruieren muss oder ein universelles GPS nutzt, das in jedem Fahrzeug auf Anhieb funktioniert. Wenn die Versprechen hinter NavFm halten, könnte dasselbe Modell, das diesen Roboterhund steuert, mit minimalem Fine-Tuning auch eine Lieferdrohne oder einen Humanoiden navigieren. Das würde die Entwicklungszeit in der Robotik massiv verkürzen und wäre ein entscheidender Schritt hin zu echten Allzweck-Robotern, die „out of the box“ mit verschiedenen Hardware-Körpern und Umgebungen klarkommen.