Während in den Forschungsabteilungen der etablierten Tech-Giganten die Geheimhaltungsvereinbarungen (NDAs) nervös fester umklammert werden, hat Roboparty den radikalen Befreiungsschlag gewagt: Das Unternehmen hat den kompletten Full-Stack-Quellcode sowie die Hardware-Baupläne für seinen zweibeinigen Roboter Roboto_Original veröffentlicht. Diese kompromisslose Transparenz ist eine direkte Ansage an die branchenübliche „Secret Sauce“-Kultur. Roboparty prognostiziert, dass dieses Open-Source-Modell die Entwicklungskosten für neue Teams um beeindruckende 80 % senken wird.
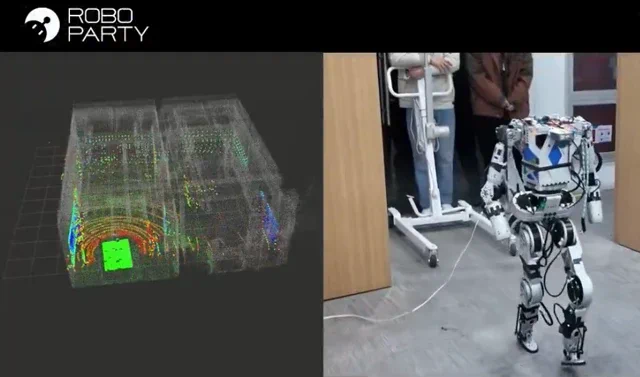
Hier geht es nicht nur um ein paar oberflächliche CAD-Dateien – Roboparty lässt komplett die Hüllen fallen. Das Release umfasst detaillierte Konstruktionszeichnungen, vollständige elektronische Stücklisten (EBOMs), eine Liste der Zulieferer und die hauseigenen AMP-Bewegungsalgorithmen. Der Bot selbst ist dabei alles andere als ein Spielzeug: Mit einer Höhe von 1,20 m, einem Gewicht von 30 kg und einer beachtlichen Laufgeschwindigkeit von 3 m/s (ca. 11 km/h) spielt er technisch ganz oben mit. Das Design setzt auf modulare Gelenke und eine Struktur auf Automotive-Niveau, was beweist, dass Open-Source-Hardware in Sachen Performance keine Kompromisse machen muss. Für Entwickler besonders spannend: Die Unterstützung des SMPL-X-Modells ermöglicht es, menschliche Motion-Capture-Daten direkt zu nutzen, was das Training von Bewegungsabläufen massiv beschleunigt.
Warum ist das wegweisend?
Mit der Bereitstellung einer vollständigen, leistungsfähigen bipedalen Plattform greift Roboparty ein altbekanntes Problem an: das ständige Neuerfinden des Rades. Jahrelang war die Robotik-Welt fragmentiert; unzählige Teams verbrannten Millionen, um isoliert dieselben grundlegenden Herausforderungen bei Fortbewegung und Hardware zu lösen. Diese Initiative schafft nun eine gemeinsame Infrastruktur. Forscher und Startups können die mühsame Basisarbeit überspringen und sich direkt auf das konzentrieren, was wirklich zählt: echten, praktischen Nutzen statt der nächsten choreografierten Video-Show für Investoren. Wenn der Plan aufgeht, könnte dies ein kollaboratives Ökosystem befeuern, das die gesamte Entwicklung verkörperter Intelligenz (Embodied AI) in Lichtgeschwindigkeit vorantreibt.
Wer bereit ist, die Zukunft der Robotik selbst in die Hand zu nehmen (oder zu „forken“), findet das vollständige Projekt auf GitHub samt der dazugehörigen Dokumentation.












