Einen dritten Roboter in die eigene Flotte aufzunehmen, sollte eigentlich kein System-Kollaps sein. Doch für gut 90 % aller Robotik-Teams ist genau das die bittere Realität. Die Koordination mehrerer Maschinen scheitert meist an der Komplexität zentraler Controller und dem enormen Hunger nach Bandbreite für die Kommunikation untereinander. Forscher der Oregon State University haben nun jedoch einen Bauplan für eine Zukunft vorgelegt, in der Roboter-Teams mit der lautlosen, emergenten Intelligenz einer Ameisenkolonie kooperieren.
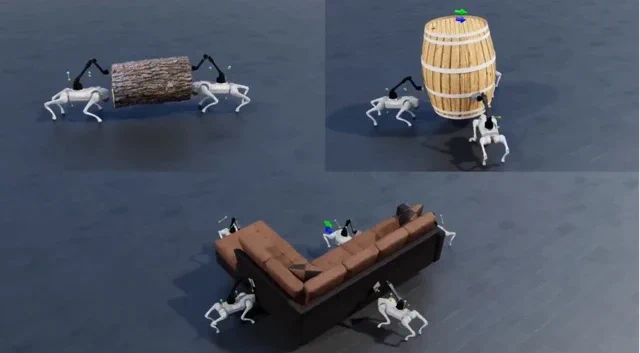
Ihr neues Paper mit dem Titel decPLM (Decentralized Pinch-Lift-Move) wurde für die IEEE International Conference on Robotics and Automation (ICRA) 2026 angenommen – in der Welt der Robotik entspricht das quasi einem Headliner-Slot beim Coachella-Festival. Das System ermöglicht es einem Team aus vierbeinigen Robotern mit Greifarmen, schwere und eigentlich unhandliche Objekte wie Baumstämme, Fässer oder sogar ein Sofa gemeinsam zu heben und zu bewegen – und das ohne ein einziges Bit an aktiver Kommunikation. Kein Master-Node, kein Wi-Fi, kein hektischer Austausch von Befehlen auf Gelenkebene. Stattdessen entsteht die Koordination rein dadurch, dass die Roboter die Kräfte spüren, die auf das getragene Objekt wirken. Sie verlassen sich ausschließlich auf ihre eigenen internen Sensoren – ein Konzept, das in der Fachwelt als Propriozeption bekannt ist.
Der Clou liegt in einer gemeinsamen Policy, die mit einem ausgeklügelten „Constellation Reward“-System trainiert wurde. Dieses motiviert die Roboter dazu, so zu agieren, als wären sie starr mit der Last verbunden. Dieser dezentrale Ansatz ist verblüffend effektiv und extrem skalierbar. Die Policy wurde in einer Simulation mit nur zwei Robotern trainiert, lässt sich aber ohne jegliches Nachtraining auf Teams von bis zu zehn Maschinen übertragen. Damit umgeht man die üblichen Netzwerk-Alpträume von Multi-Roboter-Systemen, bei denen zusätzliche Agenten oft nur zu lähmenden Latenzen und explodierender Komplexität führen.
Warum ist das so bedeutend?
Diese Forschung stellt eine gängige Annahme komplett auf den Kopf: Dass mehr Roboter zwangsläufig mehr Probleme bedeuten. Bei decPLM führen mehr Roboter tatsächlich zu weniger Fehlern. Das Team fand heraus, dass der Tracking-Fehler für die Last um beeindruckende 80 % sank, als die Flotte von zwei auf zehn Roboter vergrößert wurde. Die Redundanz des größeren Teams gleicht individuelle Patzer ganz natürlich aus, was zu einem flüssigeren und präziseren Manövrieren führt.
Indem sie die Kommunikation als Krücke weglassen, haben die Forscher aus Oregon ein System geschaffen, das von Natur aus robuster, skalierbarer und anpassungsfähiger ist. Es deutet auf eine Zukunft hin, in der das Deployment eines ganzen Schwarms von Logistik-Robotern so einfach ist wie das Hinzufügen einer weiteren Einheit zur Gruppe, ohne die gesamte Netzwerkarchitektur umbauen zu müssen. Wie die Urheber der Studie es trocken auf den Punkt bringen: Diese Arbeit beweist, dass der Flaschenhals in der Robotik längst nicht mehr die Hardware-Kapazität ist – sondern die ML-Infrastruktur.