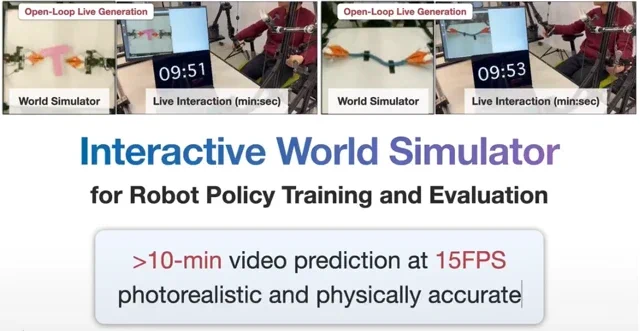
Weltmodelle in der Robotik haben oft ein Problem: Bei längeren Simulationen verlieren sie ihre physikalische Integrität schneller als ein Kartenhaus im Wind. Doch das neue Projekt Interactive World Simulator schickt sich an, diese Schwäche endgültig auszumerzen. Die Zahlen klingen fast zu gut, um wahr zu sein: Über 10 Minuten stabile, interaktive Videovorhersagen bei flüssigen 15 FPS – und das Ganze läuft auf einer einzigen NVIDIA, Inc. RTX 4090. Richtig gelesen: Zehn Minuten komplexe Physik, berechnet auf einer handelsüblichen GPU.
Entwickelt vom Forscher Yixuan Wang, ist dieses aktionsgesteuerte Weltmodell weit mehr als nur ein vorgerendertes Video. Es ist eine voll interaktive Simulation, die man in Echtzeit „steuern“ kann. Der Clou: Man kann es direkt im Browser ausprobieren – ganz ohne Python-Bibliotheken oder das gefürchtete pip install-Chaos. Das Modell meistert selbst Aufgaben mit komplexen Kontaktpunkten, von der präzisen Kabelverlegung bis hin zum Zusammenkehren von Objekthaufen. Dabei entsteht alles rein im Pixelraum. Das sind keine Aufnahmen einer echten Kamera, sondern rein generative Vorhersagen des Modells.
Warum ist das ein Game-Changer?
Hier geht es nicht nur um eine beeindruckende Tech-Demo, sondern um die Lösung für zwei der größten Kopfschmerzen in der Robotik-Entwicklung. Erstens ermöglicht das Modell eine skalierbare Datengenerierung. Statt auf langsame und teure Roboter in der echten Welt angewiesen zu sein, können Entwickler nun gigantische Mengen an physikalisch plausiblen Trainingsdaten direkt im Simulator erzeugen. Zweitens erlaubt es eine verlässliche Policy-Evaluierung. Forscher können das „Gehirn“ eines Roboters in einer sicheren, konsistenten und endlos wiederholbaren virtuellen Umgebung testen und verfeinern, bevor sie überhaupt ein Stück Hardware berühren. Kurz gesagt: Das Training von Robotern wird billiger, schneller und das Risiko, dass ein sündhaft teurer Roboterarm ein Loch in die Laborwand schlägt, sinkt drastisch.












