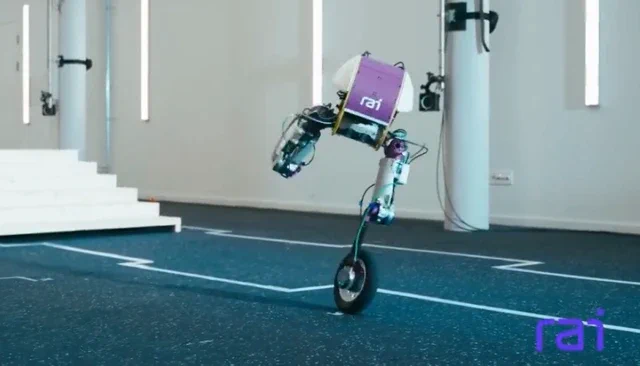
Gerade als wir dachten, zweibeinige Roboter hätten das Laufen endlich so richtig raus, kommt das Robotics & AI Institute (RAI Institute) um die Ecke und beweist, dass man manchmal mit Rollen einfach weiter kommt. Die Forschungsorganisation unter der Leitung von Boston-Dynamics-Gründer Marc Raibert hat einen neuen Prototypen namens Roadrunner enthüllt – ein federleichtes, 15 Kilogramm schweres Fliegengewicht, das herkömmliche Füße gegen ein Paar Räder eingetauscht hat. Die Maschine zeigt eine beeindruckende Symbiose verschiedener Bewegungsarten: Sie kann stabil auf parallel stehenden Rädern fahren, wie ein Profi im Inline-Modus skaten oder sogar kleine Schritte machen, um Hindernisse zu überwinden.
Die symmetrischen Beine des Roboters, deren Kniegelenke sich sowohl nach vorne als auch nach hinten knicken lassen, verleihen ihm eine außergewöhnliche Flexibilität. Doch die wahre Magie steckt nicht in der Hardware, sondern im „Hirnschmalz“ der KI. Laut RAI Institute wird die gesamte komplexe Motorik des Roadrunner von einer einzigen, universellen Steuerungs-Policy (Control Policy) kontrolliert. Das ermöglichte einige verblüffende Verhaltensweisen – wie das Aufstehen vom Boden oder das Balancieren auf nur einem Rad –, die „Zero-Shot“ direkt auf den physischen Roboter übertragen wurden. Das bedeutet: Es funktionierte beim allerersten Versuch in der Realität, ohne dass eine mühsame Feinabstimmung an der Hardware nötig war.

Das Konzept des Zero-Shot-Transfers von der Simulation in die Realität gilt als heiliger Gral der Robotik. Es reduziert den Zeit- und Kostenaufwand für das Training massiv, da der klassische „Sim-to-Real Gap“ – die oft problematische Lücke zwischen virtueller Physik und der echten Welt – elegant übersprungen wird. Durch das Training einer extrem robusten Policy in der Simulation hat das RAI Institute den Roadrunner in die Lage versetzt, seine eigene Dynamik instinktiv zu verstehen und seine gelernten Fähigkeiten sofort unter realen Bedingungen abzurufen.
Warum ist das wegweisend?
Hybride aus Beinen und Rädern sind zwar kein völlig neues Konzept – man denke nur an den beeindruckenden „Handle“-Roboter von Boston Dynamics –, doch der Roadrunner schlägt ein neues Kapitel auf. Sein extrem leichtes Design in Kombination mit einem hochmodernen, vereinheitlichten KI-System weist den Weg in eine praktischere und potenziell kosteneffizientere Zukunft. Indem sie die Energieeffizienz von Rädern auf ebenen Flächen mit der Geländegängigkeit von Beinen kombinieren, besetzen diese Roboter einen „Sweet Spot“ für die Logistik und den Einsatz in Lagerhallen.
Während vollhumanoide Roboter weiterhin daran arbeiten, das Gehen, Rennen und Rückwärtssaltos zu perfektionieren, deutet der Roadrunner eine alternative evolutionäre Route an: Eine, bei der Agilität und Effizienz über die bloße Kopie der menschlichen Form gestellt werden. Die Fähigkeit, mehrere Fortbewegungsarten mit einem einzigen KI-Modell zu meistern, ist weit mehr als ein netter Partytrick – es ist ein fundamentaler Fortschritt, der die Entwicklung und den Einsatz vielseitiger Roboter im Alltag massiv vereinfachen könnte.