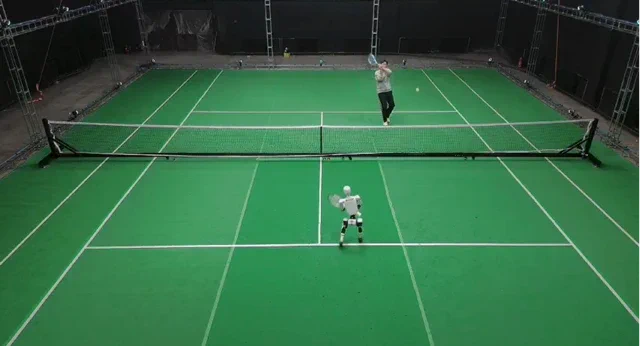
In einer Wendung, die absolut niemanden überraschen dürfte, der die rasanten Fortschritte der Robotik verfolgt, hat ein Forscher einen Roboter entwickelt, der eine neue Fähigkeit so effizient gelernt hat, dass er prompt seinen eigenen Lehrer besiegte. Die Disziplin? Tennis. Das Projekt mit dem Namen LATENT brachte einem Humanoiden das Spiel bei – und zwar nicht etwa mit klinisch reinen Profi-Daten, sondern auf Basis von unvollkommenen menschlichen Bewegungsabläufen. Das Ergebnis ist ein Roboter, der mittlerweile mühelos in langen Ballwechseln mithalten kann.
Das Projekt, geleitet von Forschern der Tsinghua University und Galbot Inc., knöpft sich eine der größten Hürden der Robotik vor: das Erlernen komplexer, agiler Bewegungen ohne ein perfektes Handbuch. Ihr System lernt einen sogenannten „Latent Action Space“ aus fragmentierten, alles andere als perfekten menschlichen Tennis-Clips. Die „Secret Sauce“ ist dabei eine übergeordnete KI-Policy, die wie ein digitaler Coach fungiert: Sie korrigiert und kombiniert diese fehlerhaften Grundfertigkeiten, um den Ball erfolgreich über das Netz zu befördern. Der gesamte Prozess wird zunächst in einer Simulation perfektioniert, bevor er per Sim-to-Real-Transfer auf einen echten Unitree G1 Humanoiden übertragen wird.

Dass das Konzept aufgeht, zeigt sich spätestens auf dem Court. Laut dem Hauptautor Zhikai Zhang war die Lernkurve beeindruckend steil. „Am ersten Tag des realen Einsatzes konnte der Roboter keinen einzigen Ball zurückspielen, den ich aufgeschlagen habe“, so Zhang. „Am letzten Tag des Projekts konnte ich ihn nicht mehr schlagen.“ Wer tiefer in die technischen Details eintauchen oder vielleicht seinen eigenen Tennis-Endgegner trainieren möchte, findet die Projektdetails und den Code online. Hyperlinks: Project Page und GitHub Repository.
Warum ist das wichtig?
Hier geht es um weit mehr als nur einen Sparringspartner für einsame Tennisprofis. Der wahre Durchbruch des LATENT-Systems liegt in der Fähigkeit, aus „unordentlichen“, unvollkommenen Daten zu lernen. Die meiste Roboter-Ausbildung erfordert bisher akribisch kuratierte Datensätze, deren Erstellung extrem teuer und zeitaufwendig ist. Indem der Roboter lernt, fehlerhafte Beispiele selbst zu korrigieren und sinnvoll zu kombinieren, könnte dieser Ansatz das Training für komplexe, reale Aufgaben massiv beschleunigen. Es ist ein entscheidender Schritt hin zu Robotern, die „on the job“ in unvorhersehbaren Umgebungen lernen können – vom Lagerhaus bis zum Katastrophenschutz –, ohne dass ihnen jedes Mal eine perfekte Demonstration serviert werden muss.