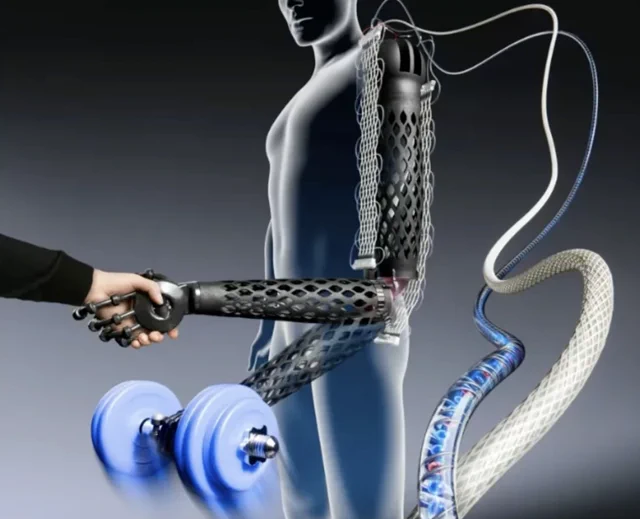
Forscher am MIT Media Lab haben eine neue Klasse künstlicher Muskelfasern entwickelt, die herkömmliche Elektromotoren wie klobige Relikte aus der technologischen Steinzeit wirken lassen. In einem aktuellen Interview gab die leitende Wissenschaftlerin Ozgun Kilic Afsar detaillierte Einblicke in die Funktionsweise dieser „elektrofluidischen Fasermuskeln“. Das Ergebnis ist beeindruckend: Ein nur 16 Gramm schweres Muskelbündel stemmt ein Gewicht von 4 Kilogramm – das ist mehr als das 250-fache der Eigenmasse. Der Durchbruch, der im Fachmagazin Science Robotics veröffentlicht wurde, macht Schluss mit sperrigen Motoren, lärmenden Kompressoren und externen Pumpen. Das gesamte Antriebssystem steckt in einem lautlosen, in sich geschlossenen Strang, der kaum dicker als ein Zahnstocher ist.

Seit Jahrzehnten ist die Robotik an die „Titanen“ des Antriebs gekettet: elektromagnetische Motoren. So kraftvoll sie auch sein mögen, sie stellen einen fragilen „Single Point of Failure“ dar. Wie Afsar erklärt, führt der Ausfall eines Motors oder seines Getriebes unweigerlich dazu, dass das komplette Gelenk des Roboters gelähmt ist. Im Gegensatz dazu imitieren diese neuen Fasern den hierarchischen und verteilten Aufbau biologischer Muskeln. Wie bei den Fasern in Ihrem Bizeps gilt: Wenn ein paar Stränge ausfallen, lässt die Leistung zwar nach, aber das System bricht nicht katastrophal zusammen („graceful degradation“). Der Clou liegt in der Integration miniaturisierter elektrohydrodynamischer (EHD) Pumpen direkt in die Faser. Diese nutzen ein elektrisches Feld, um Flüssigkeit zu bewegen und Druck zu erzeugen – und das völlig ohne bewegliche Teile.
Wir haben bereits über die erste Ankündigung dieser beeindruckenden Technologie berichtet und auf ihr Potenzial für langlebige, sogar waschbare Robotertextilien hingewiesen. Die Hintergrundstory finden Sie hier: Waschbare Muskelfasern: Textil-Kraftpaket hebt das 200-fache . Das Interview mit Afsar erlaubt nun einen tieferen Einblick in die Mechanik und die Philosophie hinter der Abkehr von starren, gelenkbasierten Antrieben. Hier geht es zum Paper in Science Robotics.
Warum ist das so wichtig?
Es geht hier nicht nur darum, stärkere oder leisere Roboter zu bauen; es geht um einen fundamentalen Paradigmenwechsel in der Konstruktion. Anstatt erst ein starres Skelett zu entwerfen und dann mühsam klobige Motoren dranzuschrauben, können Ingenieure Kraft und Bewegung nun direkt in die Struktur des Roboters einweben. Dies ebnet den Weg für wirklich „weiche“, nachgiebige Maschinen, die im direkten Kontakt mit Menschen weitaus sicherer sind, sowie für hocheffiziente Prothesen und tragbare Exoskelette. Kombiniert man dies mit anderen futuristischen Fertigungstechniken, wie sie etwa von Allonics entwickelt werden, um komplexe Roboterkörper buchstäblich zu weben, wird das Potenzial erst richtig deutlich: Allonic webt Roboter-Körper wie Muskelgewebe für 7,2 Mio. $ . Wir blicken in eine Zukunft, in der Körper und Muskeln eines Roboters zu einer Einheit verschmelzen – eine widerstandsfähige, lautlose und fast schon unheimlich lebensnahe Architektur.
